Achtung: Sicherheitshinweise
Stellen Sie sicher, dass die Stromzufuhr vor der Arbeit an elektrischen Komponenten vollständig abgeschaltet ist. Verwenden Sie isolierte Werkzeuge und tragen Sie geeignete Schutzausrüstung. Arbeiten Sie nicht in feuchten Umgebungen und vermeiden Sie Kurzschlüsse sowie beschädigte Batterien. Entladen Sie Kondensatoren vor der Arbeit, insbesondere bei Hochspannungskondensatoren. Achten Sie bei Mikrokontrollern auf korrekte Pin-Verbindungen und Schutzschaltungen. Vermeiden Sie Berührungen der Leiterbahnen und nutzen Sie antistatische Maßnahmen. Mikrocontroller-gesteuerte Maschinen oder Maschinen im Bau können unerwartete Bewegungen ausführen. Halten Sie sich außerhalb der Gefahrenzone, um Verletzungen durch Quetschen oder Einklemmen zu vermeiden.
Gesetzliche Anforderungen: Diese Hinweise dienen als Orientierung. Stellen Sie sicher, dass alle relevanten Normen und Vorschriften eingehalten werden, wie die Maschinenrichtlinie der EU (2006/42/EG) und lokale Arbeitsschutzgesetze. Eine CE-Kennzeichnung sowie eine umfassende Betriebsanleitung sind oft erforderlich.
Haftungsausschluss: Diese Anleitung dient nur als allgemeine Orientierung. Wir übernehmen keine Haftung für Schäden oder Verletzungen, die durch unsachgemäße Handhabung oder Missachtung der Sicherheitsvorschriften entstehen. Es liegt in Ihrer Verantwortung, alle gesetzlichen Anforderungen und Normen zu prüfen und einzuhalten.
Bau einer computergesteuerten Maschine: Eine Anleitung
Einleitung
Der Bau einer CNC-Maschine (Computer Numerical Control) eröffnet zahlreiche Möglichkeiten für präzise Fertigung und individuelle Anpassungen. Egal, ob du eine Fräsmaschine, einen 3D-Drucker, einen Laserschneider, einen Plasmaschneider, eine Biegemaschine oder eine andere CNC-Anlage erstellen möchtest, dieser Leitfaden führt dich durch die wesentlichen Schritte des Prozesses.
Wir behandeln alle wichtigen Aspekte des Maschinenbaus, von der Planung und dem Entwurf bis zur Montage, Verdrahtung und Inbetriebnahme. Du lernst, wie du die richtigen Komponenten auswählst, die mechanische und elektronische Struktur deiner Maschine aufbaust und ihre effiziente sowie zuverlässige Funktion sicherstellst.
Der Bau einer CNC-Maschine kann herausfordernd sein, bietet jedoch die Gelegenheit, umfassende technische Fähigkeiten zu entwickeln und ein maßgeschneidertes Werkzeug zu schaffen, das deinen spezifischen Anforderungen entspricht. Lass uns diesen Prozess gemeinsam angehen!
Leitfaden für den Bau einer Maschine
In diesem Abschnitt erläutern wir die nächsten Schritte nach der Erstellung des G-Codes. Nachdem das 3D-Modell im CAD-Prozess fertiggestellt und der G-Code im CAM-Prozess generiert wurde, ist die Maschine bereit für die Bearbeitung. Nun benötigen wir eine Maschine, die den G-Code präzise ausführt und das Werkstück entsprechend fertigt.
Der Bau oder Umbau einer Maschine lässt sich in mehrere Hauptbereiche unterteilen:
1. Antrieb:
1.1. Gleichstrommotoren (DC-Motoren)
1.2. Wechselstrommotoren (AC-Motoren)
1.3. Linearmotoren
1.4. Schrittmotoren
1.4.1. Wie finde ich heraus, welchen Schrittmotor ich benötige?
1.4.2 Schrittmotoren im Überblick
1.4.3 Schrittmotor Planung und Beispielberechnungen
2. Antriebssteuerung
2.1. Gleichstrom- und Wechselstrommotorsteuerung
2.2. Schrittmotor Steuerung
2.2.1. Wie finde ich heraus, welche Schrittmotor-Steuerung ich benötige?
2.2.2. Schrittmotor-Steuerung im Überblick
3. Stromversorgung
3.1. Normen und Richtlinien
3.2. Stromversorgung von Maschinensteuerungen
3.3. Stromversorgung von Mikroschaltern und Näherungsschaltern
3.4. Stromversorgung von Gleichstrommotoren (DC-Motoren) und Wechselstrommotoren (AC-Motoren)
4. Maschinensteuerung
4.1. Parallel-Port
4.1.1 Parallel Port Interface Board LPT-CNC-A PN41100
4.1.2 Parallel Port Interface Board LPT-CNC-B PN41200
4.1.3 Hybrid Breakout-Board-CNC-5-Achsen PN41300
4.2. USB-Port
4.2.1 USB-Interface für CNC 4-Achsen PN42100
4.2.2 USB-Interface für CNC 5-Achsen PN42200
4.2.3 USB-Interface für CNC 5-Achsen PN42300
4.2.4 USB-Interface Arduino Uno PN42400
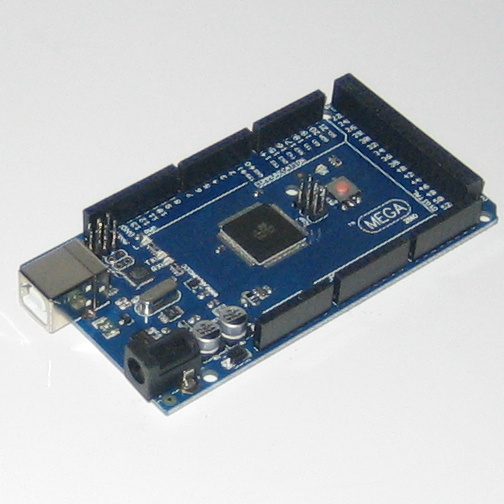
4.2.5 USB-Controller Arduino Mega PN42500
4.2.6 USB-Controller
4.2. PC RoboCore PN42000
5. Software
6. Sensorik
Jeder dieser Bereiche ist entscheidend für den reibungslosen und präzisen Betrieb der Maschine.
1. Antrieb
1.1. Gleichstrommotoren (DC-Motoren)
Gleichstrommotoren umfassen Bürstenmotoren und bürstenlose Motoren (BLDC). Bürstenmotoren nutzen Bürsten, um den Stromfluss zu steuern, sind einfach aufgebaut und weit verbreitet. Bürstenlose Motoren hingegen kommen ohne Bürsten aus, was sie wartungsärmer und effizienter macht. In unseren CNC-Maschinen können diese Motoren nur über ein Relais ein- und ausgeschaltet werden. Sie eignen sich besonders gut für den Antrieb von Fräswerkzeugen oder Drehspindeln, bei denen die Genauigkeit weniger wichtig ist.
1.2. Wechselstrommotoren (AC-Motoren)
Wechselstrommotoren umfassen Asynchron- und Synchronmotoren. Asynchronmotoren sind robust und kostengünstig, während Synchronmotoren synchron zur Frequenz des Stromnetzes laufen und oft in präzisen Anwendungen eingesetzt werden. In unseren CNC-Maschinen können diese Motoren nur über ein Relais ein- und ausgeschaltet werden. Sie werden vor allem für den Antrieb von Fräswerkzeugen oder Drehspindeln verwendet, bei denen Präzision weniger entscheidend ist.
Das Bild zeigt den Umbau einer Bohrmaschine zu einer CNC-Fräsmaschine. Die Frässpindel wird von einem 2,2 kW Wechselstrommotor (AC-Motor) mit Frequenzumrichtern angetrieben. Die benötigte Drehzahl wird über die Frequenz eingestellt, und der Motor wird über ein Relais ein- und ausgeschaltet.

1.3. Linearmotoren
Linearmotoren sind ideal für moderne CNC-Maschinen, da sie elektrische Energie direkt in lineare Bewegung umwandeln, ohne Zahnräder, Riemen oder Spindeln. Dies ermöglicht eine extrem präzise Positionierung sowie schnelle Beschleunigung und Abbremsung, was die Bearbeitungszeiten verkürzt. Mit weniger mechanischen Teilen sind Linearmotoren wartungsärmer und kompakter. Sie werden häufig für die Bewegung der Werkzeugachsen eingesetzt, was zu einer höheren Bearbeitungsqualität und reduzierten Vibrationen führt. Aufgrund ihrer individuellen Anpassung und hohen Kosten sind Linearmotoren derzeit jedoch noch nicht weit verbreitet. In unserer Anleitung zum Bau einer computergesteuerten Maschine werden wir sie aufgrund der hohen Anschaffungskosten nicht berücksichtigen.
1.4. Schrittmotoren
Schrittmotoren sind ideal für moderne CNC-Maschinen, da sie elektrische Impulse in präzise, schrittweise Bewegungen umwandeln. Sie bestehen aus einem Stator mit Elektromagneten und einem Rotor aus Magnetmaterial. Durch das sequenzielle Ein- und Ausschalten der Elektromagnete bewegt sich der Rotor in festen Winkelschritten. Dies ermöglicht eine exakte Positionierung und kontrollierte Bewegungen, was die Bearbeitungsqualität verbessert. Da Schrittmotoren in diskreten Schritten arbeiten, bieten sie eine hohe Wiederholgenauigkeit und sind einfach zu steuern. Sie werden häufig für die Bewegung der Werkzeugachsen eingesetzt, was zu präzisen und stabilen Bearbeitungsprozessen führt. Aufgrund ihrer Zuverlässigkeit und Kosteneffizienz sind Schrittmotoren weit verbreitet und eignen sich hervorragend für unsere Anleitung zum Bau einer computergesteuerten Maschine.
1.4.1. Wie finde ich heraus, welchen Schrittmotor ich benötige?
Der einfachste Weg, den richtigen Schrittmotor auszuwählen, ist die Festlegung eines Flansches. Dies ermöglicht einen einfachen Austausch gegen einen stärkeren Motor, falls erforderlich. Es ist jedoch wichtig, darauf zu achten, dass stärkere Schrittmotoren in der Tiefe mehr Platz benötigen, was bei der Planung berücksichtigt werden muss.
Aus unserer Erfahrung verwenden wir Flansche bis 57×57 mm in 3D-Druckern, Laserschneidern und Graviermaschinen für maximale Größen von bis zu 600×800 mm. Für größere Maschinen setzen wir auf einen Flansch von 60×60 mm. Hierbei ist die Motorleistung entscheidend, um Reibung sowie translatorische und rotatorische Beschleunigung zu überwinden. Je stärker der Schrittmotor, desto schneller können die Maschinen beschleunigen und verfahren.
Es sollte jedoch auch darauf geachtet werden, dass die Beschleunigungsmassen sowohl translatorisch als auch rotatorisch gering gehalten werden. Es kann passieren, dass man einen stärkeren Schrittmotor einsetzt und gleichzeitig die Masse erhöht, die der Schrittmotor beschleunigen muss. Dadurch fährt die Maschine nicht schneller.
Ein Flansch von 86×86 mm wird häufig in Fräsmaschinen oder Drehbänken eingesetzt, wo nicht nur Reibung und Beschleunigung überwunden werden müssen, sondern auch eine gewisse Kraft auf das Werkstück ausgeübt werden muss. Ein Flansch von 110×110 mm ist eine absolute Ausnahme und wird dort eingesetzt, wo wir sehr viel Kraft benötigen und es baulich nicht anders lösen können.
Diese Hinweise basieren auf Erfahrungswerten. Die Auswahl des richtigen Schrittmotors erfordert eine sorgfältige Planung, bei der Faktoren wie maximale Geschwindigkeit, Beschleunigung, Reibung, zusätzliche Bearbeitungskraft und Übersetzung berücksichtigt und berechnet werden müssen.
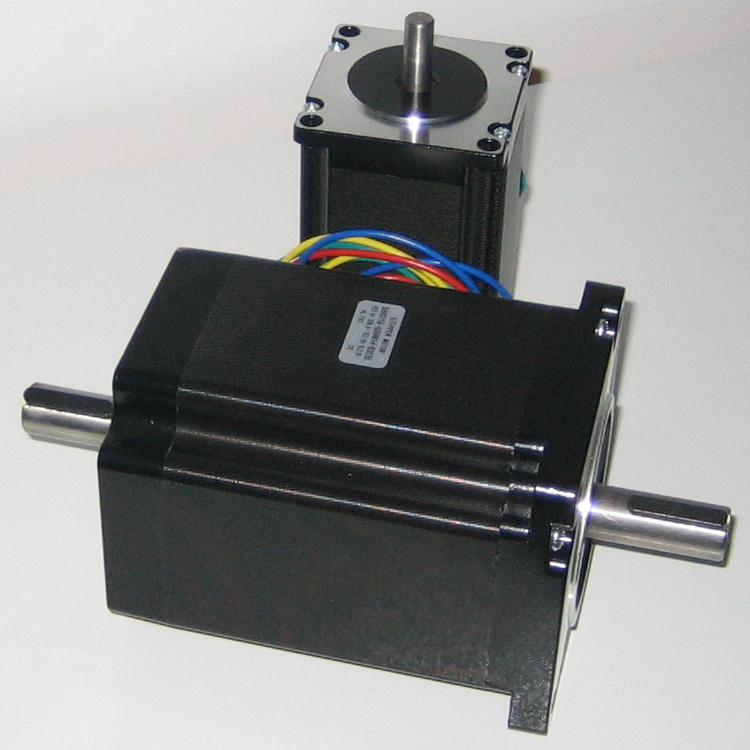
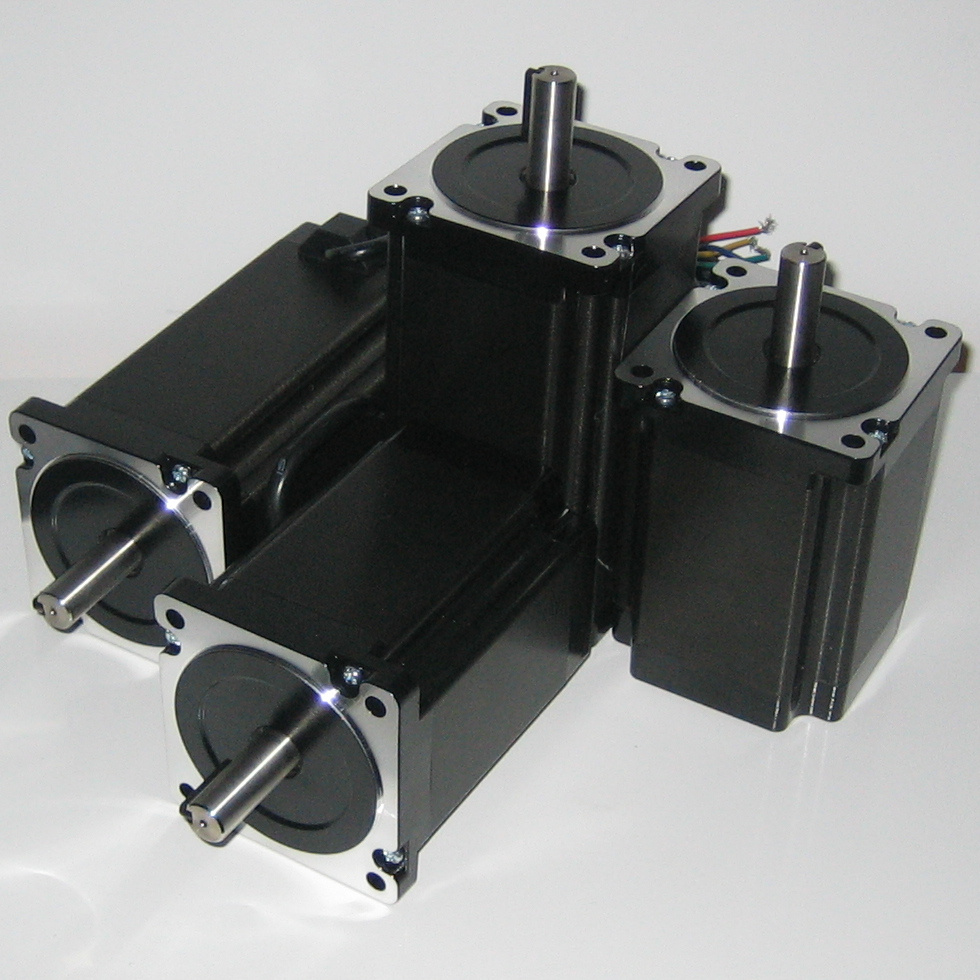
1.4.2. Schrittmotoren im Überblick
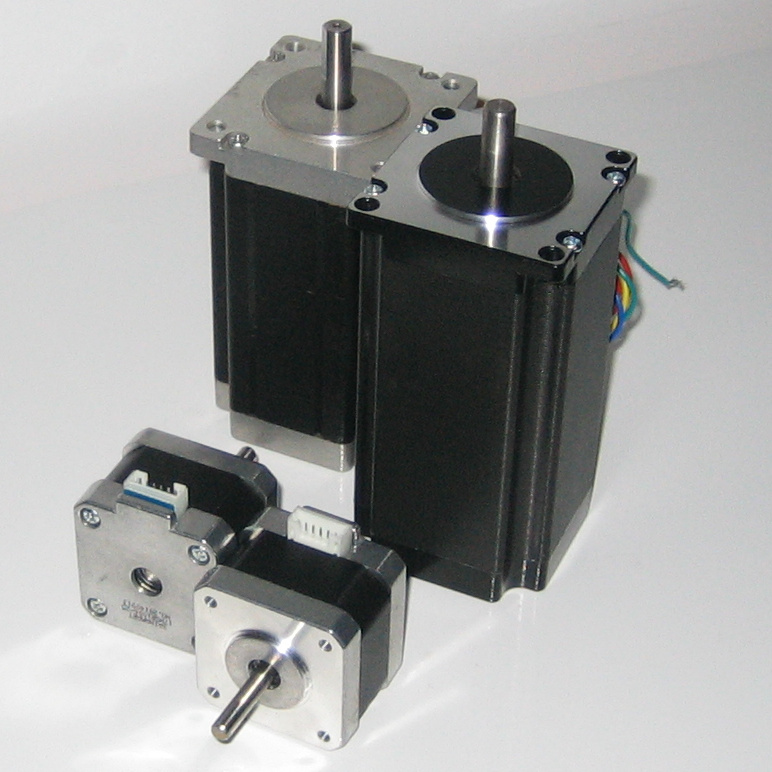
NEMA 8
Flanschgröße: 20 x 20 mm
NEMA 11
Flanschgröße: 28 x 28 mm
NEMA 14
Flanschgröße: 35 x 35 mm
Drehmoment: Bis zu 0,15 Nm
NEMA 24
Flanschgröße: 60×60 mm
Haltemoment: 1,5 Nm bis 4 Nm
Stromstärke: 2,8-4,3 A pro Phase
Spannung: 24-48 V
Gewicht: ca. 1,2 kg
Drehzahl: bis zu 2000 U/min
NEMA 17
Flanschgröße: 42×42 mm
Haltemoment: 0,2 Nm bis 0,59 Nm
Stromstärke: 1-2 A pro Phase
Spannung: 12-24 V
Gewicht: ca. 0,3 kg
Drehzahl: bis zu 3000 U/min
NEMA 34
Flanschgröße: 86×86 mm
Haltemoment: 4,5 Nm bis 12 Nm
Stromstärke: 4-6 A pro Phase
Spannung: 48-80 V
Gewicht: ca. 2,8 kg
Drehzahl: bis zu 1500 U/min
NEMA 23
Flanschgröße: 57×57 mm
Haltemoment: 1,26 Nm bis 3,18 Nm
Stromstärke: 2-3 A pro Phase
Spannung: 24-48 V
Gewicht: ca. 1,1 kg
Drehzahl: bis zu 2500 U/min
NEMA 42
Flanschgröße: 110×110 mm
Haltemoment: 15 Nm bis 22 Nm
Stromstärke: 6-8 A pro Phase
Spannung: 80-120 V
Gewicht: ca. 5,5 kg
Drehzahl: bis zu 1000 U/min
1.4.3. Schrittmotor Planung und Beispielberechnungen
Für diesen Abschnitt verwenden wir die folgenden Bauteile:
- PN14001-86FL118-6A14DL35
2. Antriebssteuerung
2.1. Gleichstrom- und Wechselstrommotorsteuerung
Gleichstrom- und Wechselstrommotoren lassen sich in unseren Maschinen einfach über ein Relais ein- und ausschalten. Diese Motoren eignen sich besonders gut für den Antrieb von Fräswerkzeugen oder Drehspindeln, bei denen Präzision weniger entscheidend ist. Es ist wichtig, den Anlaufstrom der Motoren an die Spezifikationen des Relais anzupassen. Die Relaissteuerung erfolgt über die Maschinensteuerung mit einer 5V-Spannung.
Es gibt jedoch auch Maschinen, die über Digital-Analog-Wandler (DA-Wandler) gesteuert werden und eine Drehzahlüberwachung durch Sensoren verwenden. Diese Sensoren erfassen die exakte Drehzahl und übermitteln die Informationen an die Maschinensteuerung. Die Steuerung passt dann die DA-Wandler an, um die Drehzahl entsprechend zu regulieren. Dadurch kann die Drehzahl präzise gesteuert werden, unabhängig von der Last.
Für diesen Abschnitt verwenden wir die folgenden Bauteile:
- PN
2.2. Schrittmotor-Steuerung
Für die Steuerung eines Schrittmotors ist eine Endstufe erforderlich, die elektrische Impulse von der Maschinensteuerung (5V) empfängt. Die Endstufe verstärkt diese Signale und leitet sie an die Schrittmotoren weiter, um mechanische Bewegungen zu erzeugen. Schrittmotoren bewegen sich in diskreten Schritten, wobei ein typischer Motor 200 Schritte pro Umdrehung ausführt, was einem Schrittwinkel von 1,8° entspricht. Moderne Endstufen ermöglichen durch die Unterteilung dieser Schritte eine noch feinere Positionierung. Es gibt verschiedene Steuerungsmodi: Im Vollschrittmodus werden beide Spulen des Motors gleichzeitig aktiviert, was ein höheres Drehmoment erzeugt. Im Halbschrittmodus werden die Spulen abwechselnd und gleichzeitig aktiviert, wodurch eine feinere Steuerung möglich ist. Im Mikroschrittmodus wird der Strom durch die Spulen präzise gesteuert, um extrem kleine Schritte zu realisieren und somit eine noch höhere Präzision zu erreichen. Bei der Endstufe ist es wichtig, die richtige Stromstärke auszuwählen. Ist der Strom zu niedrig, kann der Motor bei hoher Belastung Schritte verlieren und nicht seine volle Leistung erbringen. Ist der Strom zu hoch, kann sich der Motor überhitzen und beschädigt werden. Zudem bieten viele Endstufen nützliche Funktionen, wie das Haltemoment, bei dem die Schrittmotoren nach einer Bewegung in Position bleiben und ihre Haltekraft nutzen, um die Position zu sichern.
2.2.1. Wie finde ich heraus, welche Schrittmotor-Steuerung ich benötige?
Die Wahl der richtigen Schrittmotor-Steuerung hängt von mehreren Faktoren ab. Strom und Spannung des Motors, wie ausführlich in Kapitel „Wie finde ich heraus, welchen Schrittmotor ich benötige?“ beschrieben, sind entscheidend. Die Steuerung muss den erforderlichen Strom und die Spannung des Schrittmotors unterstützen. Es ist wichtig, die Spezifikationen deines Motors zu überprüfen, um sicherzustellen, dass die Steuerung kompatibel ist. Wenn du unsicher bist, ob du einen stärkeren Schrittmotor benötigst, plane genügend Reserve ein. Schrittmotor-Steuerungen bieten verschiedene Schrittmodi, wie bereits in Kapitel „Schrittmotor-Steuerung“ erläutert (Vollschritt, Halbschritt, Mikroschritt). Für präzisere Anwendungen ist eine Steuerung mit Mikroschritt-Modus sinnvoll, da sie eine feinere Kontrolle über die Motorbewegung ermöglicht.
Die Steuerung muss außerdem mit deiner Maschinensteuerung oder deinem Mikrocontroller kompatibel sein. Überprüfe, ob sie das richtige Steuersignal (z.B. 5V) empfängt. Wir verwenden keine 3,3V-Signale, achte also beim Kauf darauf. Falls der Schrittmotor hohe Ströme benötigt, sollte die Steuerung über ausreichende Kühlung verfügen oder einen integrierten Kühlkörper haben, um Überhitzung zu vermeiden.
2.2.2. Schrittmotor-Steuerung im Überblick



DRV8825
Spannung: 8,2-45V DC
Strom: 0,5-2,2A
A4988
Spannung: 8-35V DC
Strom: 0,5-2,0A
TB6600
Spannung: 9-40V DC
Strom: 0,5-3,5A
DM542
Spannung: 24-50V DC
Strom: 1,0-4,2A
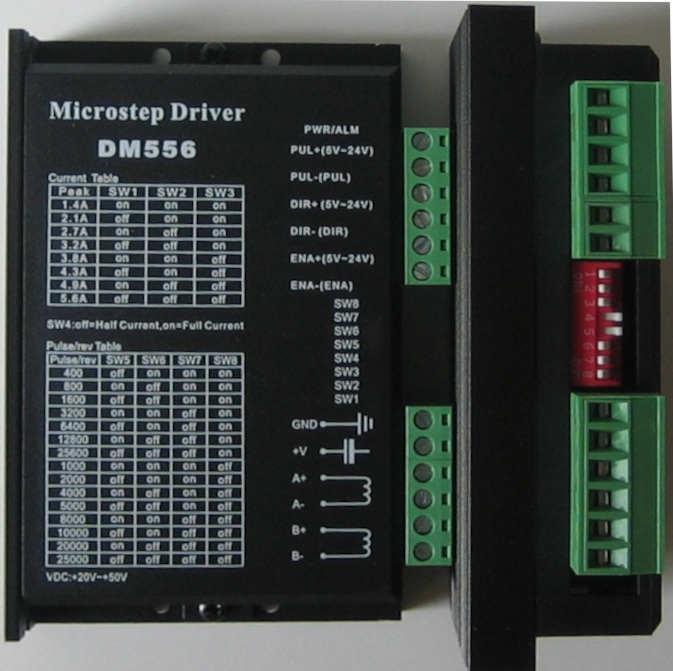
DM556
Spannung: 18-48V DC
Strom: 1,0-5,6A
DM860
Spannung: 24-80V DC
Strom: 2,4-7,2A
Für diesen Abschnitt verwenden wir die folgenden Bauteile:
- PN
3. Stromversorgung
3.1. Normen und Richtlinien
Die Stromversorgung und Maschinensteuerungen unterliegen verschiedenen Normen und Richtlinien. Die DIN EN 60204-1 behandelt die Sicherheit von Maschinensteuerungen und die elektrische Ausrüstung von Maschinen, während die IEC 61131 sich mit programmierbaren Steuerungen (SPS) und deren Anforderungen befasst. Für Mikroschalter und Näherungsschalter gilt die DIN EN 60947-5-1, die die Anforderungen an elektrische Schaltgeräte regelt. Gleichstrommotoren (DC-Motoren) und Wechselstrommotoren (AC-Motoren) fallen unter die DIN EN 60034 und die IEC 60034, die allgemeine Anforderungen an elektrische Maschinen festlegen. Schrittmotoren werden ebenfalls von der IEC 60034 abgedeckt, da sie als spezielle Art von Synchronmotoren betrachtet werden. Linearmotoren, die eine lineare Bewegung anstelle einer rotierenden Bewegung erzeugen, sind ebenfalls in der IEC 60034 enthalten.
- PN32001 Schaltnetzteil 24V120W
- PN32002 Schaltnetzteil 19V90W
- PN32003 Schaltnetzteil 12V60W
- PN32004 Netzteil 12V20W DIN-Schiene
- PN32005 Schaltnetzteil 5V25W
- PN32006 Netzteil 5V10W DIN-Schiene
Für diesen Abschnitt verwenden wir die folgenden Bauteile:
- PN
3.4. Stromversorgung von Gleichstrommotoren (DC-Motoren) und Wechselstrommotoren (AC-Motoren)
Die Stromversorgung von Gleichstrommotoren (DC-Motoren) und Wechselstrommotoren (AC-Motoren) ist entscheidend für deren zuverlässigen Betrieb. DC-Motoren werden in der Regel durch Schaltnetzteile oder Transformator-Netzteile versorgt. Schaltnetzteile sind effizient und kompakt, was sie ideal für CNC-Maschinen macht, während Transformator-Netzteile eine stabile und robuste Gleichstromversorgung bieten. Eine konstante Spannungsversorgung ist wichtig, um Spannungsschwankungen zu vermeiden, die zu Fehlfunktionen oder Schäden führen können.
DC-Motoren benötigen eine konstante Gleichspannung, während AC-Motoren mit Wechselspannung betrieben werden. Der Strombedarf der Motoren muss genau berechnet werden, damit das Netzteil ausreichend Strom liefern kann. Schutzmaßnahmen wie Überspannungs-, Überstrom- und Kurzschlussschutz sind wichtig, um die Motoren zu schützen. In kritischen Anwendungen kann eine redundante Stromversorgung die Ausfallsicherheit erhöhen.
Wechselstrommotoren werden typischerweise direkt aus dem Stromnetz versorgt, das eine sinusförmige Wechselspannung liefert. Frequenzumrichter passen die Frequenz und Spannung des Wechselstroms an, um die Drehzahl und Leistung des Motors zu steuern, was besonders nützlich für CNC-Maschinen ist, die variable Geschwindigkeiten und präzise Steuerung erfordern. Wichtige Parameter der Stromversorgung sind die Spannung (U), die entsprechend der Motorkonstruktion gewählt werden muss, die Stromstärke (I), die von der Last abhängt, die der Motor antreiben muss, die Frequenz (f), die entscheidend für die Drehgeschwindigkeit bei AC-Motoren ist, sowie die Leistung (P), wobei bei AC-Motoren der Leistungsfaktor (cosφ) berücksichtigt werden muss. Schutzmaßnahmen wie Sicherungen und Leistungsschalter schützen vor Überlastung und Kurzschlüssen.
In unseren Projekten verwenden wir meist DC-Motoren bis 2 kW. Bei einer Leistung über 2 kW setzen wir AC-Motoren mit Frequenzumrichtern ein. Dabei ist es jedoch nicht immer so einfach, da wir auch Werkzeuge wie Oberfräsen mit 800 W AC-Motoren oder kleinere Maschinen wie Dremel mit nur 450 W nutzen.
3.5 Stromversorgung von Schrittmotoren
Die zuverlässige Stromversorgung von Schrittmotoren, die je nach Motorgröße zwischen 3V und 80V oder mehr liegen kann, ist entscheidend für deren präzise Steuerung und Betrieb. Schrittmotoren werden über Endstufen mit Strom versorgt, die stabile Netzteile benötigen, um eine gleichmäßige Energiezufuhr sicherzustellen.
Endstufen empfangen elektrische Impulse von der Maschinensteuerung (5V), verstärken diese Signale und leiten sie in angepasster Form an die Schrittmotoren weiter, um präzise mechanische Bewegungen zu erzeugen. Ein üblicher Schrittmotor führt 200 Schritte pro Umdrehung aus, was einem Schrittwinkel von 1,8° entspricht. Eine konstante Spannungsversorgung ohne Schwankungen ist unerlässlich, um Fehlfunktionen und Schäden zu verhindern.
Schrittmotoren benötigen eine konstante Gleichspannung, die durch passende Netzteile bereitgestellt wird. Der Strombedarf der Motoren muss sorgfältig berechnet werden, um sicherzustellen, dass das Netzteil ausreichend Strom liefert. Um die Schrittmotoren zu schützen, sind Maßnahmen wie Überspannungs-, Überstrom- und Kurzschlussschutz unerlässlich. In kritischen Anwendungen kann eine redundante Stromversorgung die Ausfallsicherheit zusätzlich erhöhen.
- PN35001 Schaltnetzteil 48V600W
- PN35002 Schaltnetzteil 48V360W
- PN35003 Schaltnetzteil 72V600W
4. Maschinensteuerung
Der Parallelport war eine bedeutende Schnittstelle in der Computertechnik und wurde zur Ansteuerung von Peripheriegeräten wie Druckern und Maschinen genutzt. Heute weitgehend durch USB ersetzt, bleibt er in DIY-Projekten und der Steuerung selbstgebauter Maschinen relevant. Ein Parallelport überträgt Daten über mehrere Leitungen gleichzeitig, was eine schnellere Übertragung als bei seriellen Verbindungen ermöglicht. Typischerweise hat er 25 Pins und nutzt das IEEE 1284-Protokoll.
Trotz der Dominanz von USB wird der Parallelport in speziellen Anwendungen wie der CNC-Steuerung zur Ansteuerung von Motoren und Relais verwendet. Er bietet einfache, direkte Steuerung ohne komplexe Treiber, ist jedoch anfälliger und begrenzter als moderne Schnittstellen. Obwohl selten in aktuellen Computern, bleibt der Parallelport ein nützliches Werkzeug für Projekte, die auf einfache Hardwaresteuerung setzen.
4.1.1 Parallel Port Interface Board LPT-CNC-A PN41100
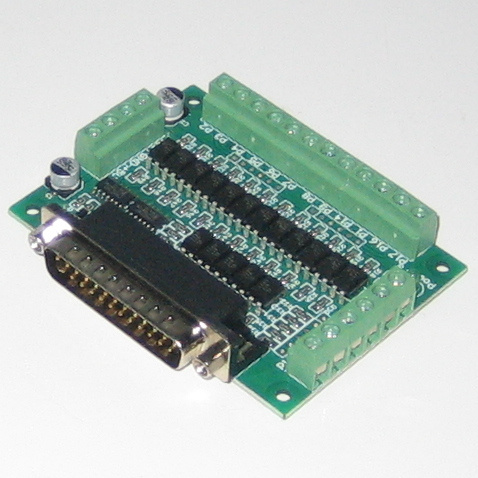
Unterstützt bis zu 6 Achsen, kompatibel mit KCAM4, EMC2/LinuxCNC. Optokoppler-Isolation (EL817) schützt Computerhardware, ideal für industrielle Anwendungen. 12 OC-Ausgänge bis 100 kHz, 5 isolierte Eingänge. Schmitt-Trigger zur Signalentstörung, +5V DC-Stromversorgung.
4.1.2 Parallel Port Interface Board LPT-CNC-B PN41200
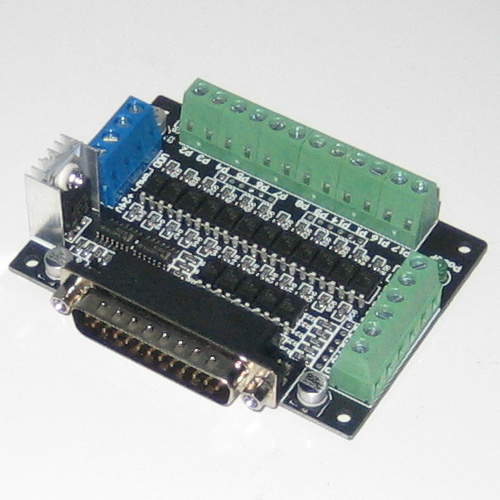
Kompatibel mit KCAM4, EMC2/LinuxCNC, bis zu 6 Achsen. EL817-Optokoppler-Isolation schützt Computer und Peripherie. 12 OC-Ausgänge bis 100 kHz, 5 isolierte Eingänge. Dual-Stromversorgung (+5V/9–36V), Schmitt-Trigger für Interferenzschutz. Steuerung von Schritt-/Servoantrieben, ideal für industrielle CNC-Anwendungen.
4.1.3 Hybrid Breakout-Board-CNC-5-Achsen PN41300

Voll kompatibel mit MACH3/4, unterstützt parallele Portsteuerung. 12–24 V Eingang mit Verpolungsschutz, getrennte USB-/Peripheriestromversorgung. Optokoppler-isolierte Eingänge für Notstopp/Werkzeugeinstellung. 0–10 V Analogausgang, 17 Ports für Schrittmotorsteuerung, PWM-Ausgang (P1).
Das dargestellte Parallel-Port-Interface mit technischer Beschreibung stellt eine vielseitige und bewährte Methode zur Steuerung von Maschinen und Geräten dar. Die Modelle LPT-CNC-A und LPT-CNC-B sind baugleich und unterscheiden sich nur geringfügig. Die LPT-CNC-A ermöglicht das Ein- und Ausschalten der Spindel, während die LPT-CNC-B zusätzlich die Drehzahlregelung unterstützt. Das Breakout-Board-CNC-5-Achsen ist ein Hybrid-Interface, das sowohl den Parallel-Port als auch USB unterstützt und mit Mach3/4 kompatibel ist. Ein Vorteil dieses Systems besteht darin, dass beide Ports genutzt werden können, ohne die Verkabelung ändern zu müssen. Der Parallel-Port benötigt keinen Treiber und ist sehr stabil, jedoch nur unter Windows XP 32-Bit. Der USB-Port ermöglicht den Betrieb mit neueren Computern und Betriebssystemen, einschließlich 64-Bit-Versionen.

4.2.2 USB-Interface für CNC 5-Achsen PN42200
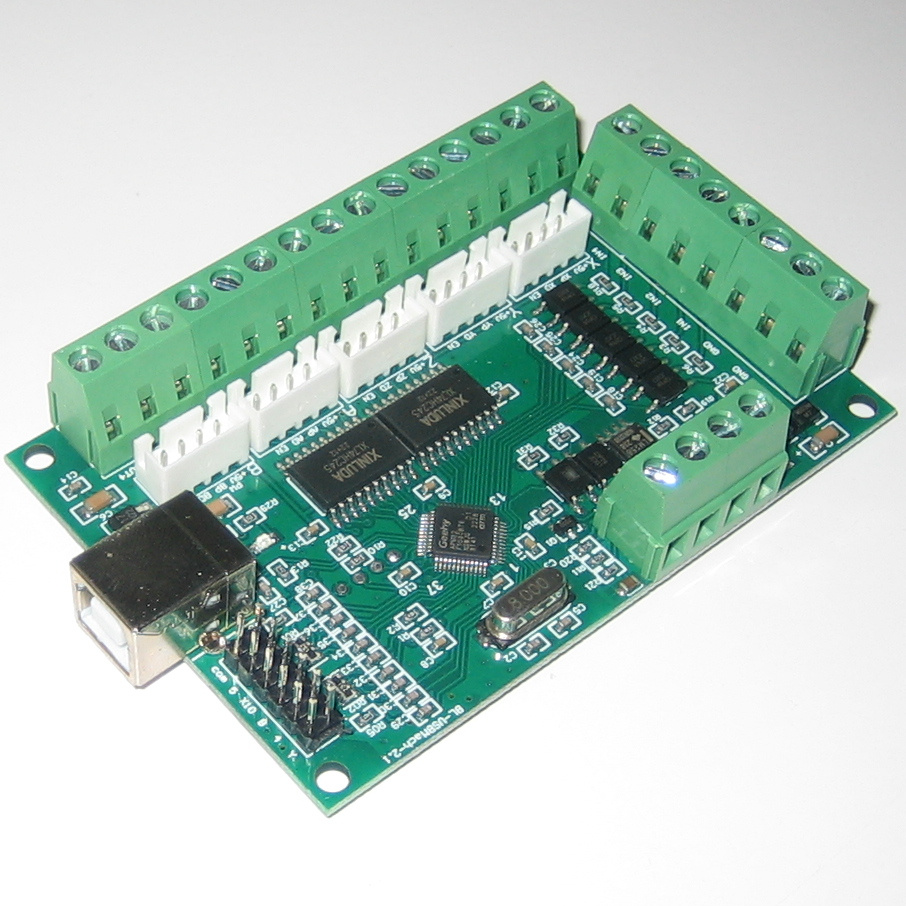
4.2.3 USB-Interface für CNC 5-Achsen PN42300

Diese USB-Interfaces sind ideal für Einsteiger geeignet, besonders in Verbindung mit dem Mach3-Steuerungsprogramm, das als kostenlose Demoversion verfügbar und sehr gut dokumentiert ist. Dadurch können Einsteiger erste Erfahrungen sammeln und sich mit der Steuerung vertraut machen. Das USB-Interface für CNC 4-Achsen PN42100 gehört zu unseren meistgenutzten Interfaces in Verbindung mit Mach3 oder anderen CNC-Steuerungsprogrammen. Es ermöglicht eine präzise Steuerung von Maschinen und unterstützt zusätzlich die manuelle Bedienung über ein Handbediengerät. Da dieses Interface auf 4 Achsen begrenzt ist, empfehlen wir bei Maschinen mit mehr als 4 Achsen entweder den Einsatz von zwei dieser Interfaces oder den Wechsel zu einem 5-Achsen-Interface, wie dem USB-Interface für CNC 5-Achsen PN42200 oder dem USB-Interface für CNC 5-Achsen PN42300. Die wesentlichen Unterschiede zwischen diesen beiden 5-Achsen-Interfaces liegen in den Anschlussmöglichkeiten für das Handbediengerät.
Es gibt viele Entwickler-Boards auf dem Markt. Wir verwenden und empfehlen, wenn möglich, auf diese universellen Entwickler-Boards zu setzen, da sie flexibel, weltweit schnell verfügbar und in großen Stückzahlen produziert werden. Sie sind zuverlässig und für zahlreiche Projekte geeignet. Die Arduino Uno und Arduino Mega Mikrocontroller-Boards sind vielseitige Werkzeuge für Elektronikprojekte und eignen sich hervorragend zum Bau von voll- oder halbautomatisierten Maschinen. Das Arduino Uno, mit seinem kompakten Design und einer einfachen USB-Schnittstelle, ist ideal als Interface für CNC-Maschinen. Das leistungsstärkere Arduino Mega eignet sich besonders für komplexe Anwendungen, wie die Steuerung von anspruchsvolleren CNC-Maschinen, die simultane Steuerung mehrerer CNC-Maschinen oder kleinere automatisierte Produktionssysteme. Beide Boards zeichnen sich durch einfache Programmierung, umfangreiches Zubehör, zahlreiche Erweiterungsmodule und eine breite Community-Unterstützung aus.
4.2.5 USB-Controller ArduinoMega PN42500